Крильчастий рушій судна

Судновий рушій - це пристрій для перетворення будь-якої енергії в корисну роботу руху судна.
Судновий крильчатий рушій (КР), відомий також під назвою рушій Фойта - Шнайдера (англ. Voith Schneider Propeller) - рушійно-рульовий пристрій з повністю зануреним у середовище крильчастим рушієм з циклоїдальним рухом лопатей, що створює упор, напрям якого може змінюватися в межах від 0 ° до 360 ° вправо або вліво при зміні кутів установки лопатей, що дозволяє дуже добре маневрувати судам і в змозі майже миттєво змінити його упор.
Зміст
Історія виникнення
Перший крильчатий рушій (КР) винайдений в 1926 році австрійцем Ернестом Шнайдером, а в 1927-1928 роках фірмою Voith GmbH було побудовано перше експериментальне судно. Першим судном, зданих в експлуатацію в 1931 році, стало судно Кемптен на Боденському озері. КР має барабан з вертикальною або майже вертикальною віссю обертання, нижня поверхня якого збігається з поверхнею днища. По окружності барабана розміщаються 3-8 лопатей. У першій конструкції КР кожна лопать здійснювала обертальний рух навколо своєї осі, паралельно осі обертання барабана, роблячи пів оберта за один оберт барабана.
У іншому варіанті КР (запропонованого Фойтом, чому такі рушії називають також рушіями Фойта-Шнайдера) лопаті не обертаються, а коливаються, так що на одній половині окружності їх носики «дивляться» назовні, а на іншій - всередину. Управління лопатями проводиться таким чином, щоб в кожному положенні на окружності лопать була перпендикулярна радіус-вектору, проведеним до неї з точки управління, розташований всередині кола, радіус якого може досягати 0,7-0,8 радіуса, на якому розташовані осі лопатей.Упор спрямований перпендикулярно відрізку прямої, що з'єднує точку управління і вісь обертання барабана, і впершому наближенні може вважатися пропорційним довжині цього відрізка. Таким чином, судну, обладнаному крильчастими рушіями, непотрібне кермо: воно може рухатися вперед і назад, розвертатися на місці,якщо має два КР, рухатися лагом (якщо два КР розташовані в різних частинах судна). ККД рушія другого типу більше, ніж першого, завдяки тому, що у лопастей є передня і задня кромка, які не змінюються місцями, як в першій конструкції, і мають форму крила, вигнутого по окружності, уздовж якої вони рухаються. Двигун може бути нереверсним, він легко узгоджується з рушієм (на відміну від звичайного гребного гвинта), управління роботою КР проводиться безпосередньо з містка.

Класифікація крильчатих рушіїв
За конструкцією крильчасті рушії поділяють на три групи:
- рушії з горизонтальними приводними валами і приводом від автономного двигуна;
- рушії з вертикальними приводними валами;
- рушіїз вбудованими двигунами.
Найбільш поширені рушії першої групи. Рушії з вертикальними приводними валами, як правило, мають малу потужність і застосовуються у допоміжних установках.
.gif)

Принцип дії крильчатого рушія
Крильчасті рушії складаються з барабана (ротора) з вертикальною або майже вертикальною віссю обертання, розташованою над днищем судна так, що нижній торець ротора збігається з днищем, і декількох лопатей у вигляді крил, що дійснюють обертальний рух разом з ротором і коливальний рух навколо своїх осей. Крильчатий рушій (при його використанні в якості основного рушія) на суднах розташовуєтьсяабо в кормовій, або в середній частині, а, наприклад, на плавучих кранах, корпусяких за формою близький до прямокутного понтону, може бути і в носі. Схема розміщення рушія (вид збоку) показана на рис. 1.
Лопаті крильчатого рушія розташовуються так, що в будь-якій точці окружності їх хорди перпендикулярні радіус-вектору, проведеному до них з точки О1, так званої точкою управління (рис. 2). При відсутності ходу ця точка збігається з віссю обертання барабана О. Точка управління може розташовуватись в будь-якому місці всередині кола, діаметр якого зазвичай складає 70-80% діаметра по осях лопатей. Число лопатей - від 3 до 8, частіше всього 5 або 6.
Напрямок упору крильчатого рушія перпендикулярно відрізку ОО1,а його величина в першому наближенні може вважатися пропорційноюдовжині цього відрізка (ексцентриситету). Таким чином, крильчатий рушійє також досить ефективним засобом управління судном завдяки можливості створення упору будь-якого напрямку. Спрощується проблема узгодження двигуна і рушія.
Відзначається, що з ростом ексцентриситету росте не тільки упор, але і ККД рушія. В якійсь мірі ексцентриситет крильчатого рушія аналогічний крокові гребного гвинта, а можливість його зміни в процесі роботи робить крильчатий рушій подібним до гвинтів регульованого кроку.

Рисунок 3. Схема сил при роботі судового крильчатого рушія
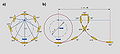
Рисунок 4.Шлях лопаті


Основи розрахунку крильчатих рушіїв
Основними розмірними характеристиками крильчатого рушія, як інших рушіїв, є упор Т і крутний момент Q на осі ротора. Вбезрозмірному вигляді ці характеристики виглядають так:
- гідродинамічний коефіцієнт упору
[math]K_T=\frac{T}{\frac{\rho u^2}{2}F_p}[/math];
- гідродинамічний коефіцієнт моменту
[math]K_Q=\frac{Q}{\frac{\rho u^2}{2}F_p \frac{D}{2}}[/math],
де Fp = DL - площа гідравлічного перетину крильчатого рушія; L -довжина лопаті; D - діаметр крильчатого рушія; u = πnD - окружна швидкысть лопатей.
ККД крильчатого рушія визначається через ці коефіцієнти майжетак само, як і у гребного гвинта:
де [math]J=\frac{V_A}{u}[/math] відносна хода крильчатого рушія.
Для оцінки ефективності рушіїв при режимі їх роботи, коли їх ККД прямує до нуля, використовують коефіцієнт якості, що представляє собою відношення ККД реального рушія до ідеального, при тому ж коефіцієнті навантаження:
Безрозмірні гідродинамічні характеристики крильчатого рушія для практичних розрахунків зазвичай представляють у вигляді кривих дії, подібних діаграмам для гвинтів регульованого кроку. На рис.5 наведено приклад такої діаграми. В якості параметра діаграми використовується відносний ексцентриситет рушія [math]\lambda_0=\frac{O O_1}{R}[/math], де [math]O O_1[/math] - ексцентриситет, [math]R[/math] - радіус по лопатям. На рис. 5 [math]\lambda_0=\lambda_0 0.75[/math]
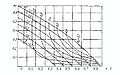
Рисунок 5 а). Крива дії крильчатого рушія [math]K_T = f(J);[/math]
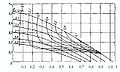
Рисунок 5 б). Крива дії крильчатого рушія [math]K_Q = f(J)[/math].


Важливе значення має ексцентриситет крильчатого рушія. У більшості конструкцій крильчастих рушіїв відносний ексцентриситет не перевищує 1,0. За даними Ван-Манена, ККД крильчатого рушія має максимум при відносному ексцентриситеті [math]\lambda_0[/math] = 1,75.
Інша важлива геометрична характеристика крильчатого рушія - дискове відношення, яке визначається за формулою:
Характер впливу дискового відношення на ефективність рушія залежить від коефіцієнта навантаження: при малому навантаженні вигідніше невелике дискове відношення, при великій - більше. Мінімально допустиме значення дискового відношення вибирається з умови відсутності кавітації; орієнтовно його можна розрахувати за формулою:
де [math]C_{TA}[/math] - коефіцієнт навантаження рушія по упору;
[math]\sigma[/math] - число кавитации;
де h - глибина занурення рушія, м.

Судно зазвичай обладнується двома крильчастими рушіями (рис. 6), що дозволяє отримати хорошу маневреність. Рекомендується встановлювати рушії протилежного обертання, щоб виключити вплив реактивного моменту. Рушії розташовують попарно в носі (що характерно для буксирів)або в кормі. На поромах і плавучих кранах зустрічається діагональне розташування рушіїв. Найкращі якості, як правило, забезпечуютьсЯ при кормовому розташуванні рушіїв, крім випадків тихохідних суден з великою повнотою. Перед рушієм і за ним повинні бути площадки довжиною не менше діаметра перед рушієм і двох діаметрів за ним,що необхідно для покращення підтікання води до рушію і взаємодії з корпусом. Особлива увага придається на плавність обводів судна в районі крильчастих рушіїв.
Коефіцієнти взаємодії рушія з корпусом знаходять шляхом самохідних випробувань.
У попередніх розрахунках приймають:
[math]\psi =0,05-0,10, t = 0,1-0,15[/math], - для суден з гострими обводами і транцевой кормою;
[math]\psi =0,20-0,30, t = 0,10-0,20[/math] - для суден з повними обводами типу буксирів, плавкранів і поромів.
Використана література
- Артюшков Л.С., Ачкинадзе А.Ш., Русецкий А.А. Судовые движители. Л.:
Судостроение, 1988;
- Справочник по теории корабля: в 3 т. Т. 1. Гидромеханика. Сопротивле-
ние движению судов. Судовые движители / под ред. Я.И. Войткунского. Л.: Су- достроение, 1985;
- Алферьев М.Я. Ходкость и управляемость судов. Сопротивление воды
движению судов. М.: Транспорт, 1967;
- Грузинов В.И. и др. Крыльчатые движители. Л.: Судостроение, 1973.