Відмінності між версіями «Гідродинамічний підшипник»
Marina (обговорення • внесок) м |
Shkod (обговорення • внесок) |
||
| (Не показані 27 проміжних версій 2 користувачів) | |||
| Рядок 1: | Рядок 1: | ||
| − | + | [[Файл:Підшипник_гіродинамічний.jpg|thumb|300px|Загальний вигляд ]] | |
| + | [[Файл:ГПА3.jpg|thumb|200px|Гідродинамічний упорний підшипник (конструкція)]] | ||
| − | + | '''Гідродинамічний підшипник''' (рос.-''гидродинамический подшипник'',англ.-''hydrodynamic bearing'') - це підшипник ковзання з мастилом, в якому несучий оливний шар створюється при обертанні шпинделя внаслідок прилипання оливи до поверхонь шийки і вкладки і затягування її в клиновий зазор між робочими поверхнями в результаті взаємодії між частинками оливи. Для переміщення в′язкої рідини з області з низьким тиском в область підвищеного тиску витрачається енергія від зовнішнього джерела. Прилиплий змащувальний матеріал до робочої поверхні чинить опір стиранню і рухається в область з підвищеним тиском. Точка найбільшого тиску знаходиться на деякій відстані перед точкою мінімального зазору. Вздовж шийки тиск розподіляється за законом, близьким до параболічного. Гідродинамічні підшипники ще називають гіродинамічними опорами. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
===Принцип роботи гідродинамічного підшипника=== | ===Принцип роботи гідродинамічного підшипника=== | ||
| − | + | Принцип роботи заснований на гідродинамічному ефекті, що полягає у виникненні підіймальної сили в зазорі між рухомими тілами,які розділені шаром рідини чи газу.Сила збільшується з приростом швидкості руху і зменшенням зазору, вона являється рівнодійною тисків масляного клину. | |
| − | |||
===Класифікація гідродинамічних підшипників=== | ===Класифікація гідродинамічних підшипників=== | ||
| − | :: | + | ====Одноклинові==== |
| + | |||
| + | <gallery caption="Гідродинамічні одноклинові підшипники"> | ||
| + | Файл:Підшипник з осьовим регулюванням зазору.jpeg|Шпиндельний підшипник з осьовим регулюванням зазору | ||
| + | Файл:Одноклиновий.jpeg|Схема одноклинового гідродинамічного підшипника | ||
| + | |||
| + | </gallery> | ||
| − | + | Якщо в підшипнику є один звужувальний зазор, який утворює один оливний клин то такий підшипник називається ''одноклиновим''. | |
Одноклинові підшипники прецизійних і швидкохідних шпинделів мають низку недоліків, з яких найбільш суттєвим є те,що вони не забезпечують стабільне положення шпинделя при великих швидкостях і малих навантаженнях. Проте конструктивно вони простіші. Прикладом такого підшипника може бути підшипник з осьовим регулюванням зазору. | Одноклинові підшипники прецизійних і швидкохідних шпинделів мають низку недоліків, з яких найбільш суттєвим є те,що вони не забезпечують стабільне положення шпинделя при великих швидкостях і малих навантаженнях. Проте конструктивно вони простіші. Прикладом такого підшипника може бути підшипник з осьовим регулюванням зазору. | ||
| − | + | '''Одноклиновий підшипник з осьовим регулюванням зазору''' | |
| + | |||
| + | Конічна розрізна вкладка 3 входить у конічний отвір втулки 2 або корпуса. У разі осьового переміщення вкладками гайками 1 і 4 вона деформується і в результаті змінюється зазор, але спотворюється форма вкладки. Нещільне прилягання вкладки до отвору знижує жорсткість опори. Для усунення цього явища в розріз вкладки, яка має форму ластівчиного хвоста, вводять головки болтів 5, аналогічної форми. Під час затягування болтів вкладка розширюється і притискається до поверхні отвору, спотворення отвору вкладки зменшується, тому й підвищується жорсткість опори. Проте в сучасних верстатах вкладки такого типу зустрічаються рідко. | ||
| + | |||
| + | ====Багатоклинові==== | ||
| + | |||
| + | <gallery caption="Гідродинамічні багатоклинові підшипники"> | ||
| + | Файл:Багатоклиновий підшипник з осьвим регулюванням зазору.jpeg|Шпиндельний підшипник з осьовим регулюванням зазору | ||
| + | Файл:Багатоклиновий.jpeg||Схема багатоклинового гідродинамічного підшипника | ||
| + | </gallery> | ||
| + | |||
| + | Підшипники які мають декілька оливних клинів, забезпечуючи цим більш високу точність і положення осі шпинделя,називають ''багатоклиновими''. | ||
| + | У багатоклинового підшипника оливні клини взаємно навантажують один одного, що у багато разів перевищує зовнішнє навантаження і забезпечує стабільне положення осі шпинделя у разі неробочого обертання і під навантаженням. Багатоклинові підшипники найбільш повно відповідають вимогам , які ставляться до шпиндельних підшипників. | ||
| + | |||
| + | :'''Багатоклиновий підшипник з осьовим регулюванням зазору''' | ||
| + | Тонкостінна вкладка має три або більше виступів, які спираються на конічну поверхню отвору корпусу. За осьового зміщення вкладки 2 з допомогою гайки 1 вона деформується і, між поверхнею шийки шпинделя і внутрішньою поверхнею вкладки утворюються сегментоподібні кишені, в яких розміщується мастило. Таким чином утворюється декілька оливних клинів. Мінімальний зазор складає 0,002-0,003 мм. Завдяки малому зазору і наявності декількох оливних клинів підшипники цього типу забезпечують високу стабільність положення осі шпинделя. Змащування підшипників здійснюється гасом або сумішшю гасу з оливою. Підшипник відрізняється низькою несучою здатністю і використовується за навантаження, яке не перевищує 1 кН. Недоліком даної конструкції є також складність обробки, яка повинна бути виконана з дуже високою точністю. | ||
| + | Такі підшипники мають явну перевагу над одноклиновими, забезпечуючи: стійке обертання шпинделя за малих зовнішніх навантаженнь і великих швидкостях ковзання; мають високу жорсткість несучих оливних клинів; дають змогу регулювати величину діаметрального зазору без спотворення форми робочих поверхонь; мають меншу температуру внаслідок кращих умов тепловідведення. | ||
| + | |||
| + | ===Конструктивні параметри гідродинамічних підшипників=== | ||
| + | |||
| + | Конструктивні параметри гідродинамічних підшипників визначаються, виходячи з діаметра <math>\mathit{D} \</math> шийки шпинделя, який вибраний з умов необхідної жорсткості. Довжина <math>\mathit{L} \</math> сегмента в осьовому напрямку і довжина дуги охоплення <math>\mathit{B} \</math>, см.приймається із співвідношення | ||
| + | |||
| + | <math>L = 0,75\cdot \mathit{D } \</math> <math>B\approx \mathit{0,5}\cdot \mathit{D} \</math> | ||
| + | |||
| + | <math>\mathit{D} \</math> - діаметр шийки шпинделя | ||
| + | |||
| + | Діаметральний зазор, мкм | ||
| + | |||
| + | <math>\Delta \ = 3\cdot \mathit{D } \</math> | ||
| + | |||
| + | ===Розрахунок багатоклинового гідродинамічного підшипника=== | ||
| + | |||
| + | Визначається вантажна здатність <math>\mathit{F}_\delta \</math>. За умови навантаження на кожний сегмент, у разі зміщення центру шпинделя під дією зовнішнього навантаження рівному нулю: | ||
| + | |||
| + | <center><math>\mathit{F}_{o}\ = 0,5\cdot \Large{\frac { \mu \cdot \mathit{n} \cdot \mathit{D} \cdot \mathit{B} \cdot \mathit{L} \ }{ \Delta^2 \ }\cdot \mathit{c}_L \ }</math> </center> | ||
| + | де | ||
| + | <center><math>\mathit{c}_{L}\ = \Large{\frac {1,25}{1 + \frac{\mathit{B}^2\ }{\mathit{L}^2 \ } }</math> </center> | ||
| + | |||
| + | Вантажна здатність підшипника <math>\mathit{F}_\delta \</math> дорівнює | ||
| + | |||
| + | :<center><math>\mathit{F}_\delta \ = \Large{\sum_{1}^k \vec {F}_i \ }</math> </center> | ||
| + | |||
| + | де <math>\mathit{k} \</math> - кількість сегментів. | ||
| + | |||
| + | Вантажна здатність дорівнює нулю у разі відсутності зовнішніх сил, найбільше її значення <math>\left (\mathit{F}_\delta \right)_{max} \</math> відповідає мінімально допустимому зазору <math>\mathit{h}_{min} \</math> у підшипнику; звичайно <math>\mathit{h}_{min} = \frac{\Delta}{3 } \</math>, що дає змогу одержати для підшипників з трьома сегментами таку наближену залежність,Н: | ||
| + | |||
| + | <math>\left (\mathit{F}_\delta \right)_{max} = 0,036 \cdot \mathit{n} \cdot \mathit{D}^2 \</math> | ||
| + | |||
| + | Жорсткість гідродинамічних опор визначається не стільки жорсткістю шару мастила <math>\mathit{j}_m\</math>, скільки жорсткістю елементів і спряжень конструкції підшипника <math>\mathit{j}_k\</math>. | ||
| − | + | Сумарна жорсткість опори, Н/мм: | |
| − | + | <center><math>\mathit{j}_{on}\ = \Large{\frac{\mathit{j}_m \cdot \mathit{j}_m \ }{\mathit{j}_m \ + \mathit{j}_k \ } }</math> </center> | |
| + | За малих навантажень, а відповідно, невеликих відносних зміщеннях для підшипника з трьома сегментами: | ||
| + | <center><math>\mathit{j}_m\ = 0,09\cdot \mathit{n} \cdot \mathit{b} \</math></center> | ||
| + | і за великою частотою обертання шпинделя вона виявляється дуже високою. Але жорсткість елементів конструкції у разі дотику сегментів з опорними поверхнями не перевищує 250...300Н/мкм: | ||
| − | + | <math>\mathit{j}_k\ = 125\cdot \mathit{d} \cdot \mathit{c}^2 \</math> | |
| − | + | ,де <math>\mathit{d}_c \</math> - діаметр опорної півсфери, см; звичайно <math>\mathit{d}_c = 1,5..2,5 \</math> см. | |
| − | |||
| − | |||
| − | |||
| − | [[Файл: | + | ===Сфери застосування гідродинамічних підшипників=== |
| + | [[Файл:Вентилятор_на_базі_гідродинамічного_підшипника.jpg |150px|thumb|right|Гідродинамічний підшипник у вентиляторі для охолодження процесора]] | ||
| + | Гідродинамічні підшипники одержали найбільш широке застосування в машинах завдяки простоті конструкції, хоча в періоди пуску, повільного прокручування й зупинки вони працюють в умовах граничного (або навіть «сухого») тертя. | ||
| + | *У прецизійних сучасних верстатах які працюють за невеликими навантаженнями, особливо в шліфувальних, зустрічається гідродинамічний підшипник з нерозрізною конічною вкладкою(підшипник "Макензен"-Японія). | ||
| + | *Використання гідродинамічних підшипників ковзання замість підшипників кочення в комп’ютерних HDD (Hard Disk Drive) дає можливість регулювати швидкість обертання шпинделів в широкому діапазоні, зменшити шум і вплив вібрацій на роботу пристроїв, тим самим дозволивши збільшити швидкість передачі даних і забезпечити збереження записаної інформації, а також – створити більш компактні HDD (0,8-дюймові). Проте є ряд недоліків: високі втрати на тертя і, отже, знижений коефіцієнт корисної дії (0,95… 0,98);необхідність в безперервному змащенні;нерівномірний знос підшипника і цапфи;застосування для виготовлення підшипників дорогих матеріалів. | ||
| + | *У насосах, наприклад у циркуляційному насосі реактора РБМК-1000. | ||
| + | *У вентиляторах(сooler)для охолодженя комп'ютерного процесора. Використання такого виду підшипників дозволяє зменшити шум і підвіщити ефективність системи охолодження. Відзначається, що гідродинамічний підшипник навіть на початковому етапі своєї роботи виявляється тихішим від підшипника ковзання, що вважається самим тихим, ну і звичайно, він тихіший двох шарикопідшипників. Після закінчення певного періоду експлуатації він не втрачає свої акустичні властивості і не стає більш гучнішим, на відміну від інших підшипників. | ||
| − | |||
| − | + | ===Цікаві відомості про гідродинамічні підшипники=== | |
| − | + | [[Файл:Hydrodynamic-Bearing-Demonstration-Rig-2003_01450.jpg|150px|thumb|right| Демонстрація гідродинамічного підшипника]] | |
| + | На міжнародному щорічному семінарі з питань технології машинобудування був продемонстрований новий зразок гідродинамічного підшипника. Його особливістю полягає в тому, що робоча рідина приводиться в дію ручним приводом (важелем рукоятки). По ходу обертання важеля, під дією накачаного повітря, формується плівка натягу на поверхні рідини між поверхнями скользіння. Більшої швидкості та навантаження можна досягнути шляхом регулювання обертового моменту панелі індикації. | ||
| + | ===Література=== | ||
| + | *Розрахунок та конструювання металорізальних верстатів: Пiдручник / В.М.Бочков,Р.І.Сілін,О.В.Гаврильченко, Львів:Бескид Біт, 2008.- 445 с. | ||
| + | *Металлорежущие станки: Підручник / В.Э.Пуш, Москва:Машиностроение, 1986.-564 с. | ||
| − | + | ===Посилання=== | |
| + | :*http://en.wikipedia.org/wiki/Fluid_bearing (англ.вікіпедія) | ||
Поточна версія на 10:01, 3 лютого 2011


Гідродинамічний підшипник (рос.-гидродинамический подшипник,англ.-hydrodynamic bearing) - це підшипник ковзання з мастилом, в якому несучий оливний шар створюється при обертанні шпинделя внаслідок прилипання оливи до поверхонь шийки і вкладки і затягування її в клиновий зазор між робочими поверхнями в результаті взаємодії між частинками оливи. Для переміщення в′язкої рідини з області з низьким тиском в область підвищеного тиску витрачається енергія від зовнішнього джерела. Прилиплий змащувальний матеріал до робочої поверхні чинить опір стиранню і рухається в область з підвищеним тиском. Точка найбільшого тиску знаходиться на деякій відстані перед точкою мінімального зазору. Вздовж шийки тиск розподіляється за законом, близьким до параболічного. Гідродинамічні підшипники ще називають гіродинамічними опорами.
Зміст
- 1 Принцип роботи гідродинамічного підшипника
- 2 Класифікація гідродинамічних підшипників
- 3 Конструктивні параметри гідродинамічних підшипників
- 4 Розрахунок багатоклинового гідродинамічного підшипника
- 5 Сфери застосування гідродинамічних підшипників
- 6 Цікаві відомості про гідродинамічні підшипники
- 7 Література
- 8 Посилання
Принцип роботи гідродинамічного підшипника
Принцип роботи заснований на гідродинамічному ефекті, що полягає у виникненні підіймальної сили в зазорі між рухомими тілами,які розділені шаром рідини чи газу.Сила збільшується з приростом швидкості руху і зменшенням зазору, вона являється рівнодійною тисків масляного клину.
Класифікація гідродинамічних підшипників
Одноклинові
- Гідродинамічні одноклинові підшипники
Шпиндельний підшипник з осьовим регулюванням зазору
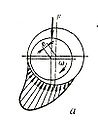
Схема одноклинового гідродинамічного підшипника


Якщо в підшипнику є один звужувальний зазор, який утворює один оливний клин то такий підшипник називається одноклиновим. Одноклинові підшипники прецизійних і швидкохідних шпинделів мають низку недоліків, з яких найбільш суттєвим є те,що вони не забезпечують стабільне положення шпинделя при великих швидкостях і малих навантаженнях. Проте конструктивно вони простіші. Прикладом такого підшипника може бути підшипник з осьовим регулюванням зазору.
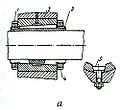
Одноклиновий підшипник з осьовим регулюванням зазору
Конічна розрізна вкладка 3 входить у конічний отвір втулки 2 або корпуса. У разі осьового переміщення вкладками гайками 1 і 4 вона деформується і в результаті змінюється зазор, але спотворюється форма вкладки. Нещільне прилягання вкладки до отвору знижує жорсткість опори. Для усунення цього явища в розріз вкладки, яка має форму ластівчиного хвоста, вводять головки болтів 5, аналогічної форми. Під час затягування болтів вкладка розширюється і притискається до поверхні отвору, спотворення отвору вкладки зменшується, тому й підвищується жорсткість опори. Проте в сучасних верстатах вкладки такого типу зустрічаються рідко.
Багатоклинові
- Гідродинамічні багатоклинові підшипники
Шпиндельний підшипник з осьовим регулюванням зазору
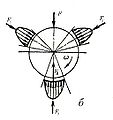
Схема багатоклинового гідродинамічного підшипника


Підшипники які мають декілька оливних клинів, забезпечуючи цим більш високу точність і положення осі шпинделя,називають багатоклиновими. У багатоклинового підшипника оливні клини взаємно навантажують один одного, що у багато разів перевищує зовнішнє навантаження і забезпечує стабільне положення осі шпинделя у разі неробочого обертання і під навантаженням. Багатоклинові підшипники найбільш повно відповідають вимогам , які ставляться до шпиндельних підшипників.
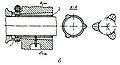
- Багатоклиновий підшипник з осьовим регулюванням зазору
Тонкостінна вкладка має три або більше виступів, які спираються на конічну поверхню отвору корпусу. За осьового зміщення вкладки 2 з допомогою гайки 1 вона деформується і, між поверхнею шийки шпинделя і внутрішньою поверхнею вкладки утворюються сегментоподібні кишені, в яких розміщується мастило. Таким чином утворюється декілька оливних клинів. Мінімальний зазор складає 0,002-0,003 мм. Завдяки малому зазору і наявності декількох оливних клинів підшипники цього типу забезпечують високу стабільність положення осі шпинделя. Змащування підшипників здійснюється гасом або сумішшю гасу з оливою. Підшипник відрізняється низькою несучою здатністю і використовується за навантаження, яке не перевищує 1 кН. Недоліком даної конструкції є також складність обробки, яка повинна бути виконана з дуже високою точністю. Такі підшипники мають явну перевагу над одноклиновими, забезпечуючи: стійке обертання шпинделя за малих зовнішніх навантаженнь і великих швидкостях ковзання; мають високу жорсткість несучих оливних клинів; дають змогу регулювати величину діаметрального зазору без спотворення форми робочих поверхонь; мають меншу температуру внаслідок кращих умов тепловідведення.
Конструктивні параметри гідродинамічних підшипників
Конструктивні параметри гідродинамічних підшипників визначаються, виходячи з діаметра [math]\mathit{D} \[/math] шийки шпинделя, який вибраний з умов необхідної жорсткості. Довжина [math]\mathit{L} \[/math] сегмента в осьовому напрямку і довжина дуги охоплення [math]\mathit{B} \[/math], см.приймається із співвідношення
[math]L = 0,75\cdot \mathit{D } \[/math] [math]B\approx \mathit{0,5}\cdot \mathit{D} \[/math]
[math]\mathit{D} \[/math] - діаметр шийки шпинделя
Діаметральний зазор, мкм
[math]\Delta \ = 3\cdot \mathit{D } \[/math]
Розрахунок багатоклинового гідродинамічного підшипника
Визначається вантажна здатність [math]\mathit{F}_\delta \[/math]. За умови навантаження на кожний сегмент, у разі зміщення центру шпинделя під дією зовнішнього навантаження рівному нулю:
де
Вантажна здатність підшипника [math]\mathit{F}_\delta \[/math] дорівнює
[math]\mathit{F}_\delta \ = \Large{\sum_{1}^k \vec {F}_i \ }[/math]
де [math]\mathit{k} \[/math] - кількість сегментів.
Вантажна здатність дорівнює нулю у разі відсутності зовнішніх сил, найбільше її значення [math]\left (\mathit{F}_\delta \right)_{max} \[/math] відповідає мінімально допустимому зазору [math]\mathit{h}_{min} \[/math] у підшипнику; звичайно [math]\mathit{h}_{min} = \frac{\Delta}{3 } \[/math], що дає змогу одержати для підшипників з трьома сегментами таку наближену залежність,Н:
[math]\left (\mathit{F}_\delta \right)_{max} = 0,036 \cdot \mathit{n} \cdot \mathit{D}^2 \[/math]
Жорсткість гідродинамічних опор визначається не стільки жорсткістю шару мастила [math]\mathit{j}_m\[/math], скільки жорсткістю елементів і спряжень конструкції підшипника [math]\mathit{j}_k\[/math].
Сумарна жорсткість опори, Н/мм:
За малих навантажень, а відповідно, невеликих відносних зміщеннях для підшипника з трьома сегментами:
і за великою частотою обертання шпинделя вона виявляється дуже високою. Але жорсткість елементів конструкції у разі дотику сегментів з опорними поверхнями не перевищує 250...300Н/мкм:
[math]\mathit{j}_k\ = 125\cdot \mathit{d} \cdot \mathit{c}^2 \[/math] ,де [math]\mathit{d}_c \[/math] - діаметр опорної півсфери, см; звичайно [math]\mathit{d}_c = 1,5..2,5 \[/math] см.
Сфери застосування гідродинамічних підшипників

Гідродинамічні підшипники одержали найбільш широке застосування в машинах завдяки простоті конструкції, хоча в періоди пуску, повільного прокручування й зупинки вони працюють в умовах граничного (або навіть «сухого») тертя.
- У прецизійних сучасних верстатах які працюють за невеликими навантаженнями, особливо в шліфувальних, зустрічається гідродинамічний підшипник з нерозрізною конічною вкладкою(підшипник "Макензен"-Японія).
- Використання гідродинамічних підшипників ковзання замість підшипників кочення в комп’ютерних HDD (Hard Disk Drive) дає можливість регулювати швидкість обертання шпинделів в широкому діапазоні, зменшити шум і вплив вібрацій на роботу пристроїв, тим самим дозволивши збільшити швидкість передачі даних і забезпечити збереження записаної інформації, а також – створити більш компактні HDD (0,8-дюймові). Проте є ряд недоліків: високі втрати на тертя і, отже, знижений коефіцієнт корисної дії (0,95… 0,98);необхідність в безперервному змащенні;нерівномірний знос підшипника і цапфи;застосування для виготовлення підшипників дорогих матеріалів.
- У насосах, наприклад у циркуляційному насосі реактора РБМК-1000.
- У вентиляторах(сooler)для охолодженя комп'ютерного процесора. Використання такого виду підшипників дозволяє зменшити шум і підвіщити ефективність системи охолодження. Відзначається, що гідродинамічний підшипник навіть на початковому етапі своєї роботи виявляється тихішим від підшипника ковзання, що вважається самим тихим, ну і звичайно, він тихіший двох шарикопідшипників. Після закінчення певного періоду експлуатації він не втрачає свої акустичні властивості і не стає більш гучнішим, на відміну від інших підшипників.
Цікаві відомості про гідродинамічні підшипники

На міжнародному щорічному семінарі з питань технології машинобудування був продемонстрований новий зразок гідродинамічного підшипника. Його особливістю полягає в тому, що робоча рідина приводиться в дію ручним приводом (важелем рукоятки). По ходу обертання важеля, під дією накачаного повітря, формується плівка натягу на поверхні рідини між поверхнями скользіння. Більшої швидкості та навантаження можна досягнути шляхом регулювання обертового моменту панелі індикації.
Література
- Розрахунок та конструювання металорізальних верстатів: Пiдручник / В.М.Бочков,Р.І.Сілін,О.В.Гаврильченко, Львів:Бескид Біт, 2008.- 445 с.
- Металлорежущие станки: Підручник / В.Э.Пуш, Москва:Машиностроение, 1986.-564 с.
Посилання
- http://en.wikipedia.org/wiki/Fluid_bearing (англ.вікіпедія)