Відмінності між версіями «Гідродинамічний підшипник»
Marina (обговорення • внесок) м |
Marina (обговорення • внесок) м |
||
| Рядок 47: | Рядок 47: | ||
<math>\mathit{D} \</math> - діаметр шийки шпинделя | <math>\mathit{D} \</math> - діаметр шийки шпинделя | ||
| − | math>\Delta \ = 3\cdot \mathit{D } \</math> | + | <math>\Delta \ = 3\cdot \mathit{D } \</math> |
Версія за 20:36, 2 січня 2011
| |
Дана стаття являється неперевіреним навчальним завданням.
До вказаного терміну стаття не повинна редагуватися іншими учасниками проекту. Після завершення терміну виконання будь-який учасник може вільно редагувати дану статтю і витерти дане попередження, що вводиться за допомогою шаблону. |
Зміст
[сховати]Гідродинамічний підшипник
- Гідродинамічний підшипник (рос.-гидродинамический подшипник,англ.-hydrodynamic bearing) - це підшипник ковзання з мастилом, в якому несучий оливний шар створюється в разі обертання шпинделя внаслідок прилипання оливи до поверхонь шийки і вкладки і затягування її в клиновий зазор між робочими поверхнями в результаті взаємодії між частинками оливи. Для переміщення в′язкої рідини з області з низьким тиском в область підвищеного тиску витрачається енергія від зовнішнього джерела. Прилиплий змащувальний матеріал до робочої поверхні чинить опір стиранню і рухається в область з підвищеним тиском. Точка найбільшого тиску знаходиться на деякій відстані перед точкою мінімального зазору. Вздовж шийки тиск розподіляється за законом, близьким до параболічного. Гідродинамічні підшипники ще називають гіродинамічними опорами.
- Підшипник гідродинамічний

Загальний вигляд
Схематичне позначення


Принцип роботи гідродинамічного підшипника
- Принцип роботи заснований на гідродинамічному ефекті, що полягає у виникненні підіймальної сили в зазорі між рухомими тілами,які розділені шаром рідини чи газу.Сила збільшується з приростом швидкості руху і зменшенням зазору, вона являється рівнодійною тисків масляного клину.

Класифікація гідродинамічних підшипників
- а) Одноклинові
- Якщо в підшипнику є один звужувальний зазор, який утворює один оливний клин то такий підшипник називається одноклиновим.
Одноклинові підшипники прецизійних і швидкохідних шпинделів мають низку недоліків, з яких найбільш суттєвим є те,що вони не забезпечують стабільне положення шпинделя при великих швидкостях і малих навантаженнях. Проте конструктивно вони простіші. Прикладом такого підшипника може бути підшипник з осьовим регулюванням зазору.

Одноклиновий підшипник з осьовим регулюванням зазору
- Конічно розрізна вкладка 3 входить у конічний отвір втулки 2 або корпуса. У разі осьового переміщення вкладками гайками 1 і 4 вона деформується і в результаті змінюється зазор, але спотворюється форма вкладки. Нещільне прилягання вкладки до отвору знижує жорсткість опори. Для усунення цього явища в розріз вкладки, яка має форму ластівчиного хвоста, вводять головки болтів 5, аналогічної форми. Під час затягування болтів вкладка розширюється і притискається до поверхні отвору, спотворення отвору вкладки зменшується, тому й підвищується жорсткість опори. Проте в сучасних верстатах вкладки такого типу зустрічаються рідко.

- б) Багатоклинові
- Підшипники які мають декілька оливних клинів, забезпечуючи цим більш високу точність і положення осі шпинделя,називають багатоклиновими.
У багатоклинового підшипника оливні клини взаємно навантажують один одного, що у багато разів перевищує зовнішнє навантаження і забезпечує стабільне положення осі шпинделя у разі неробочого обетрання і під навантаженням. Багатоклинові підшипники найбільш повно відповідають вимогам , які ставляться до шпиндельних підшипників.

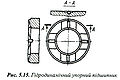
Багатоклиновий підшипник з осьовим регулюванням зазору
Такі підшипники мають явну перевагу над одноклиновими, забезпечуючи: стійке обертання шпинделя за малих зовнішніх навантаженнь і великих швидкостях ковзання; мають високу жорсткість несучих оливних клинів; дають змогу регулювати величину діаметрального зазору без спотворення форми робочих поверхонь; мають меншу температуру внаслідок кращих умов тепловідведення.
Конструктивні параметри гідродинамічних підшипників
Конструктивні параметри гідродинамічних підшипників визначаються, виходячи з діаметра [math]\mathit{D} \[/math] шийки шпинделя, який вибраний з умов необхідної жорсткості. Довжина [math]\mathit{L} \[/math] сегмента в осьовому напрямку і довжина дуги охоплення [math]\mathit{B} \[/math], см.приймається із співвідношення
[math]L = 0,75\cdot \mathit{D } \[/math] [math]B\approx \mathit{0,5}\cdot \mathit{D} \[/math]
[math]\mathit{D} \[/math] - діаметр шийки шпинделя
[math]\Delta \ = 3\cdot \mathit{D } \[/math]
